verl: Flexible and Efficient RL for LLMs
2025/06/30
2.1 RL is Complex Dataflow

Reinforcement Learning (RL) can be modelled as complex dataflow graph (Schaarschmidt et al. 2019; Liang et al. 2021; Sheng et al. 2025), consisting of:
- multiple models: actor, critic, reference, reward model, etc.
- multiple stages: generating, preparing experiences, training
- multiple workloads: generation, inference, training
2.2 LLM Workloads Are Distributed
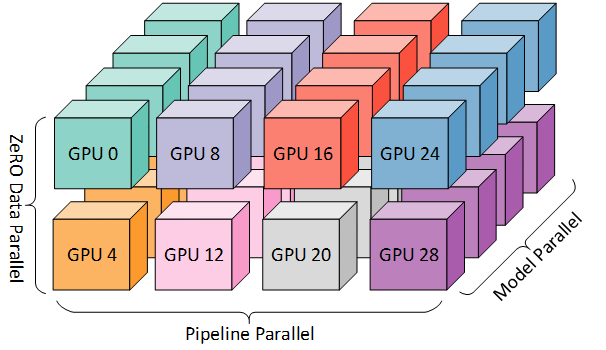
LLM workloads often involves:
- many GPUs
- complex parallelism strategies
2.3 RL with LLMs is Large-Scale Distributed Dataflow

2.4 Constraints: Data Dependencies & Resource Limitations

3.1 Flexibility: “Single-Controller”

for prompts in dataloader:
# Stage 1: Generation
batch = actor.generate_sequences(prompts)
# Stage 2: Experience Preparation
batch = reward.compute_reward(batch)
batch = reference.compute_log_prob(batch)
batch = critic.compute_values(batch)
batch = compute_advantage(batch, "gae")
# Stage 3: Training
critic.update_critic(batch)
actor.update_actor(batch)3.3 Efficiency: “Hybrid Engine”
verl is efficient for inter-operator with the “hybrid engine” paradigm, utilizing features like:
- offloading & reloading enables fully utilizing the GPU memory
- resharding enables switching for the optimal parallelism strategy

3.4.2 Easy for Extension
Many popular projects are built on top of verl, including:










4.1 Background: Single-Controller vs. Multi-Controller


- Single-Controller (MPMD): A centralized controller manages all the workers, running different programs.
- Multi-Controller (SPMD): Each worker has its own controller, running the same program with different data.
4.3 New Paradigm: Hybrid-Controller!
💡 Hybrid-Controller = Single-Controller + N x Multi-Controller

5.1 Async Engine for Multi-Turn Rollout

- Synchronous Engine: returns all the outputs in the batch at the same time
- Asynchronous Engine: returns each output as soon as it is ready
Thanks for Listening!
Welcome to join the verl community to discuss / contribute!
💻 Code Repository @ https://github.com/volcengine/verl
❓ Further Questions @ tongyuxuan361@bytedance.com
💼 We Are Recruiting! @ haibin.lin@bytedance.com

7.1 Sequence Packing

- Remove padding tokens and packs multiple data sequences into a row
- Tweak the attention mask & position IDs to avoid cross-contamination
To enable this, use use_remove_padding.
7.2.2 Balancing across DP Ranks

- balance the valid tokens dispatched to each rank
- by reordering the samples in each batch
To enable this, use balance_batch.
9.1 Presenter Contact
- Email: tongyuxuan361@gmail.com
- WeChat / X: tongyx361

